A léptetőmotor egy olyan elektromos motor, amely az elektromos energiát mechanikai energiává alakítja, és kimeneti nyomatéka és sebessége pontosan szabályozható a tápegység vezérlésével.
I. A léptetőmotor előnyei
Nagy pontosságú
A léptetőmotor forgásszöge arányos a bemeneti impulzusok számával, így pontosan szabályozható az impulzusok száma és frekvenciája, így a motor pozíciója és sebessége pontosan szabályozható. Ez a tulajdonság teszi a léptetőmotorokat kiválóvá azokban az alkalmazásokban, amelyek nagy pontosságú pozicionálást igényelnek, például CNC szerszámgépekben, nyomdagépekben és textilipari gépekben.
A léptetőmotorok pontossága általában 3% és 5% között van lépésenként, és nem halmozzák fel a hibát az előző lépésről a következőre, azaz nem generálnak kumulatív hibákat. Ez azt jelenti, hogy a léptetőmotorok képesek magas pozíciópontosságot és mozgásismétlési pontosságot fenntartani hosszú ideig vagy folyamatos mozgás esetén.
Magasan szabályozható

A léptetőmotorok működését az impulzusáram szabályozásával érik el, így a motor vezérlése szoftveres programozással valósítható meg. Ez a programozhatóság lehetővé teszi, hogy a léptetőmotorok számos alkalmazás igényeit kielégítsék, például automatizált gyártósorokon, robotikában és más területeken.
Mivel a léptetőmotor válaszát csak a bemeneti impulzus határozza meg, nyílt hurkú vezérlés alkalmazható, ami egyszerűbbé és olcsóbbá teszi a motor felépítését. A nyílt hurkú vezérlés csökkenti a rendszer bonyolultságát és a karbantartási költségeket is.
Nagy nyomaték alacsony fordulatszámon
A léptetőmotorok nagy nyomatékot adnak le alacsony fordulatszámon, ami kiválóvá teszi őket az alacsony fordulatszámot és nagy nyomatékot igénylő alkalmazásokban, például az automatikus címkézőgépekben és a csomagológépekben.
A léptetőmotorok álló helyzetben maximális nyomatékkal rendelkeznek, ami előnyössé teszi őket olyan alkalmazásokban, ahol pozícióstabilitásra vagy külső terhelésekkel szembeni ellenállásra van szükség.
Nagy megbízhatóság

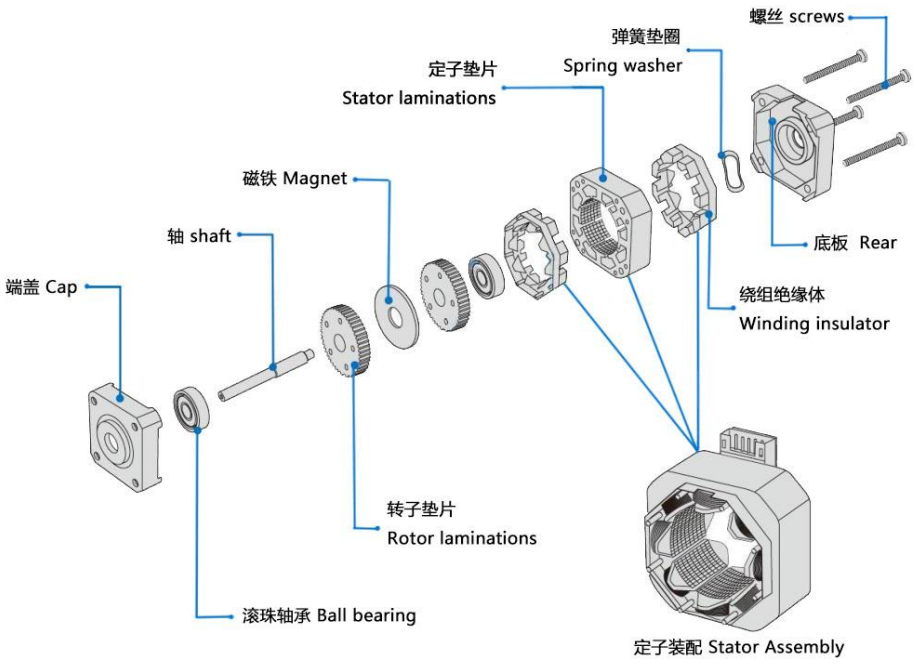
A léptetőmotorokban nincsenek kefék, így csökkennek a kefék kopása miatti meghibásodások és zaj. Ezáltal a léptetőmotorok rendkívül megbízhatóak, a motor élettartama nagymértékben függ a csapágyak élettartamától.
A léptetőmotorok egyszerű felépítésűek, három részből állnak: magából a motorból, a meghajtóból és a vezérlőből, így a telepítés és a karbantartás viszonylag egyszerű.
Széles sebességtartomány

A léptetőmotorok viszonylag gyors sebességtartománnyal rendelkeznek, és a motor sebessége az impulzusfrekvencia beállításával módosítható. Ez lehetővé teszi a léptetőmotor számára, hogy alkalmazkodjon a különböző üzemi sebességekhez és terhelési követelményekhez.
Jó indítási-leállítási és hátrameneti válasz
A léptetőmotorok gyorsan reagálnak a vezérlőjelekre indításkor és leállításkor, és nagy pontosságot és stabilitást biztosítanak irányváltáskor. Ez a tulajdonság előnyt jelent a léptetőmotorok számára az alkalmazásokban, ahol gyakori indítási-leállítási és irányváltási igény mutatkozik.
II. A léptetőmotorok hátrányai
Könnyű elveszíteni a lépést vagy túllépni
Nem megfelelő vezérlés esetén a léptetőmotorok hajlamosak a túllépésre vagy a lökéshullámra. A lökéshullám azt jelenti, hogy a motor nem forog egy előre meghatározott számú lépésben, míg a lökéshullám azt jelenti, hogy a motor egy előre meghatározott számú lépésnél többet forog. Mindkét jelenség a motor pozíciópontosságának csökkenéséhez vezet, és befolyásolja a rendszer teljesítményét.
A lépéseltérés és a túllépés keletkezése olyan tényezőktől függ, mint a motor terhelése, a forgási sebessége, valamint a vezérlőjel frekvenciája és amplitúdója. Ezért léptetőmotorok használatakor ezeket a tényezőket gondosan figyelembe kell venni, és megfelelő intézkedéseket kell tenni a lépéseltérés és a túllépés elkerülése érdekében.
Nehézségek a nagy forgási sebesség elérésében
A léptetőmotor forgási sebességét a működési elve korlátozza, és általában nehéz nagy forgási sebességet elérni. Bár a motor sebessége növelhető a vezérlőjel frekvenciájának növelésével, a túl magas frekvencia olyan problémákhoz vezet, mint a motor túlmelegedése, megnövekedett zaj, sőt akár a motor károsodása is.
Ezért léptetőmotorok használatakor a megfelelő sebességtartományt kell kiválasztani az alkalmazási követelményeknek megfelelően, és kerülni kell a hosszú ideig tartó nagy sebességen történő működést.
Érzékeny a terhelésváltozásokra
A léptetőmotorok működés közben valós idejű szabályozást igényelnek az áramimpulzusok számának és frekvenciájának szabályozására a pozíció és a sebesség pontos szabályozásának biztosítása érdekében. Nagy terhelésváltozások esetén azonban a vezérlőáram-impulzus zavart szenvedhet, ami instabil mozgást és akár kontrollálatlan léptetést is eredményezhet.
A probléma megoldására zárt hurkú vezérlőrendszer használható a motor helyzetének és sebességének figyelésére, és a vezérlőjelnek a tényleges helyzetnek megfelelő beállítására. Ez azonban növeli a rendszer bonyolultságát és költségeit.
Alacsony hatékonyság
Mivel a léptetőmotorok állandó leállítás és indítás között vezérelhetők, hatásfokuk viszonylag alacsony más típusú motorokhoz képest (pl. egyenáramú motorok, váltakozó áramú motorok stb.). Ez azt jelenti, hogy a léptetőmotorok ugyanazon kimeneti teljesítmény mellett több energiát fogyasztanak.
A léptetőmotorok hatékonyságának javítása érdekében olyan intézkedések alkalmazhatók, mint a vezérlési algoritmusok optimalizálása és a motorveszteségek csökkentése. Ezeknek az intézkedéseknek a megvalósítása azonban bizonyos szintű technológiát és költségbefektetést igényel.
III., a léptetőmotorok alkalmazási köre:
A léptetőmotorokat széles körben használják számos területen egyedi előnyeik és bizonyos korlátaik miatt. Az alábbiakban részletesen ismertetjük a léptetőmotorok alkalmazási körét:
Robotika és automatizálási rendszerek
A léptetőmotorokat széles körben használják ipari robotokban, automatizált gyártósorokban és más területeken. Pontosan szabályozhatják a robotok mozgási sebességét és irányát, valamint nagy pontosságú pozicionálást és gyors reagálást biztosítanak az automatizált gyártási folyamatokban.
CNC szerszámgépek

Nyomtatók

A léptetőmotorokat a nyomtatófej mozgásának vezérlésére használják olyan eszközökben, mint a tintasugaras és lézernyomtatók. A motor mozgásának precíz vezérlésével kiváló minőségű szöveg- és képnyomtatás valósítható meg. Ez a tulajdonság teszi a léptetőmotorokat széles körben használtá a nyomtatóberendezésekben.
Orvosi eszközök

A léptetőmotorokat orvosi képalkotó berendezésekben (pl. röntgengépek, CT-szkennerek stb.) használják a pásztázó keret mozgásának meghajtására. A motor mozgásának precíz vezérlésével a beteg gyors és pontos képalkotása valósítható meg. Ez a tulajdonság teszi a léptetőmotorokat fontos szereppé az orvosi berendezésekben.
Repülőgépipar

A léptetőmotorokat repülőgépipari berendezésekben, például műholdak helyzetszabályozó és rakétameghajtási rendszerekben lévő aktuátorok mozgásának vezérlésére használják. A léptetőmotorok jó teljesítményt nyújtanak a nagy pontosságú és nagy stabilitású követelmények esetén. Ez a tulajdonság teszi a léptetőmotorokat a repülőgépipar fontos részévé.
Szórakoztató és játékfelszerelés

A léptetőmotorokat olyan eszközökben, mint a lézergravírozók, 3D nyomtatók és játékvezérlők, az aktuátorok mozgásának vezérlésére használják. Ezekben az eszközökben a léptetőmotorok pontos vezérlése kritikus fontosságú a kiváló minőségű termék és a nagyszerű felhasználói élmény eléréséhez.
Oktatás és kutatás

A léptetőmotorokat kísérleti platformok mozgásának vezérlésére használják olyan helyzetekben, mint a laboratóriumi műszerek és az oktatóeszközök. Az oktatásban a léptetőmotorok alacsony költségük és nagy pontosságuk ideális oktatási eszközzé teszi őket. A léptetőmotorok precíz vezérlési jellemzőinek kihasználásával segíthetnek a diákoknak jobban megérteni a fizikát és a mérnöki alapelveket.
Összefoglalva, a léptetőmotorok előnyei a nagy pontosság, a szabályozhatóság, az alacsony fordulatszám és a nagy nyomaték, valamint a nagy megbízhatóság, de hátrányaik is vannak, mivel könnyen eltérnek a lépéstől vagy eltolódnak a lépéstől, nehezen érhetők el nagy fordulatszámok, érzékenyek a terhelésváltozásokra és alacsony a hatásfok. A léptetőmotorok kiválasztásakor figyelembe kell venni azok előnyeit és hátrányait, valamint az alkalmazási követelményeknek megfelelő alkalmazási kört a rendszer teljesítményének és stabilitásának biztosítása érdekében.
Közzététel ideje: 2024. november 14.