.jpg)
.jpg)
.jpg)
.jpg)
Nema 11 (28 mm-es) hibrid léptetőmotor, bipoláris, 4 kivezetéses, ACME menetes bekötésű, alacsony zajszint, hosszú élettartam, nagy teljesítmény.
Nema 11 (28 mm-es) hibrid léptetőmotor, bipoláris, 4 kivezetéses, ACME menetes bekötésű, alacsony zajszint, hosszú élettartam, nagy teljesítmény.
Ez a 28 mm-es hibrid léptetőmotor három típusban kapható: külső meghajtású, átmenőtengelyes és átmenőfixtengelyes. Az Ön egyedi igényei szerint választhat.
Maximális tolóerő akár 240 kg, alacsony hőmérséklet-emelkedés, alacsony rezgés, alacsony zajszint, hosszú élettartam (akár 5 millió ciklus) és nagy pozicionálási pontosság (akár ±0,01 mm)
VSM28HSM standard külső motor körvonalrajza:
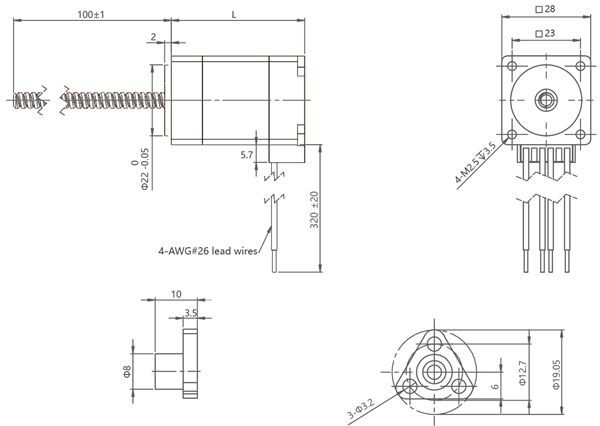
Megjegyzések:
A vezetőcsavar hossza testreszabható
Az egyedi megmunkálás megvalósítható a vezérorsó végén
Leírások
| Termék neve | 20 mm-es külső hajtású hibrid léptetőmotorok |
| Modell | VSM20HSM |
| Típus | hibrid léptetőmotorok |
| Lépésszög | 1,8° |
| Feszültség (V) | 2,5 / 6,3 |
| Áramerősség (A) | 0,5 |
| Ellenállás (ohm) | 5,1 / 12,5 |
| Induktivitás (mH) | 1,5 / 4,5 |
| Ólomvezetékek | 4 |
| Tartónyomaték (Nm) | 0,02 / 0,04 |
| Motorhossz (mm) | 30 / 42 |
| Környezeti hőmérséklet | -20℃ ~ +50℃ |
| Hőmérséklet-emelkedés | Max. 80 ezer |
| Átütési szilárdság | 1 mA max. @ 500 V, 1 kHz, 1 mp. |
| Szigetelési ellenállás | 100MΩ min. @500Vdc |
Tanúsítványok

Elektromos paraméterek:
| Motor mérete | Feszültség/ Fázis (V) | Jelenlegi/ Fázis (A) | Ellenállás/ Fázis (Ω) | Induktivitás/ Fázis (mH) | Száma Ólomvezetékek | Rotor tehetetlensége (g.cm2) | Tartónyomaték (Nm) | Motor hossza L (mm) |
| 20 | 2.5 | 0,5 | 5.1 | 1.5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4.5 | 4 | 3 | 0,04 | 42 |
Általános műszaki paraméterek:
| Radiális hézag | 0,02 mm maximum (450 g-os terhelés) | Szigetelési ellenállás | 100MΩ @500VDC |
| Axiális hézag | 0,08 mm maximum (450 g-os terhelés) | Átütési szilárdság | 500 V AC, 1 mA, 1 s @ 1 kHz |
| Max. radiális terhelés | 15 N (20 mm-re a karima felületétől) | Szigetelési osztály | B osztály (80K) |
| Max. axiális terhelés | 5N | Környezeti hőmérséklet | -20℃ ~ +50℃ |
Csavar specifikációk:
| Vezérorsó átmérője (mm) | Ólom (mm) | Lépés (mm) | Kikapcsolási önzáró erő (N) |
| 3.5 | 0,6096 | 0,003048 | 80 |
| 3.5 | 1 | 0,005 | 40 |
| 3.5 | 2 | 0,01 | 10 |
| 3.5 | 4 | 0,02 | 1 |
| 3.5 | 8 | 0,04 | 0 |
Nyomaték-frekvencia görbe
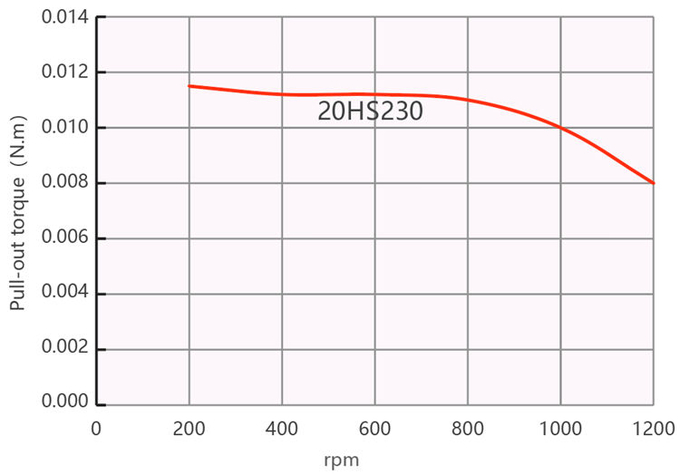
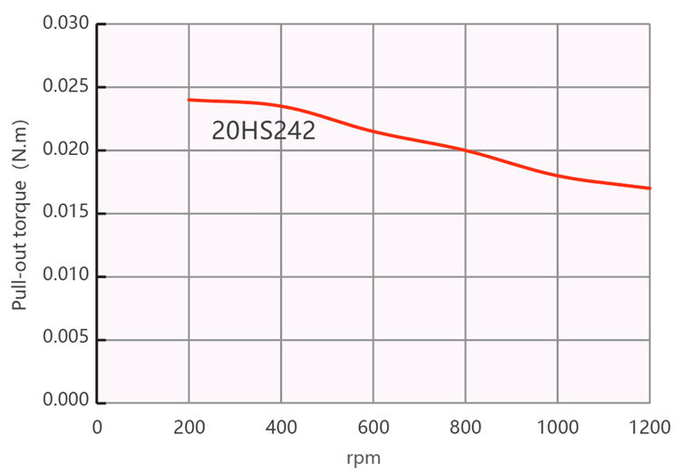
Tesztfeltétel:
Chopper hajtás, fél mikrolépéses, meghajtófeszültség 24V
Alkalmazási területek
3D nyomtatás:A 20 mm-es hibrid léptetőmotorok mozgásvezérlésre használhatók 3D nyomtatókban a nyomtatófej, a tárgyasztal és az axiális mozgásrendszer meghajtására.
Automatizálási berendezések: Ezeket a léptetőmotorokat általában automatizálási berendezésekben, például automata csomagológépekben, automata összeszerelő sorokban, automata kezelő robotkarokban stb. használják a pontos pozíció és sebesség szabályozására.
Robotika:A robotika területén 20 mm-es hibrid léptetőmotorokat használnak a robotok ízületi mozgásainak vezérlésére a pontos helyzet- és pozíciószabályozás érdekében.
CNC szerszámgépek:Ezeket a léptetőmotorokat CNC szerszámgépekben is használják szerszámok vagy asztalok precíz mozgásának meghajtására a nagy pontosságú megmunkáláshoz.
Orvosi felszerelés:Az orvostechnikai eszközökben a 20 mm-es hibrid léptetőmotorok segítségével pontosan vezérelhetők az orvostechnikai eszközök alkatrészeinek, például sebészeti robotoknak és gyógyszeradagoló rendszereknek a mozgása.
Autóipari felszerelés:Az autóiparban ezek a léptetőmotorok autóipari alkatrészek, például ablakemelő és -leengedő rendszerek, ülésbeállító rendszerek stb. helyzetének és mozgásának vezérlésére használhatók.
Okosotthon:Az okosotthonok területén a 20 mm-es hibrid léptetőmotorok használhatók függönyök nyitásának és zárásának, otthoni biztonsági rendszerek kameráinak forgatásának stb. vezérlésére.
Ezek csak néhány a 20 mm-es hibrid léptetőmotorok gyakori alkalmazási területei közül, sőt, a léptetőmotorok széles körben alkalmazhatók különböző iparágakban és területeken. A konkrét felhasználási forgatókönyvek a specifikációiktól, a teljesítményüktől és a vezérlési követelményeiktől is függenek.
Előny
Pontosság és pozicionálási képesség:A hibrid léptetőmotorok nagy pontosságot és pozicionálási képességet kínálnak a finom léptetésekhez, gyakran alacsony lépésszögekkel, például 1,8 fokkal vagy 0,9 fokkal, ami pontosabb pozícióvezérlést eredményez.
Nagy nyomaték és nagy sebesség:A hibrid léptetőmotorok szerkezetileg nagy nyomatékot, és a megfelelő meghajtóval és vezérlővel nagy sebességet biztosítanak. Ez alkalmassá teszi őket olyan alkalmazásokhoz, amelyek nagy nyomatékot és nagy sebességű mozgást is igényelnek.
Szabályozhatóság és programozhatóság:A hibrid léptetőmotorok nyílt hurkú vezérlőrendszerek, jó szabályozhatósággal. A vezérlő minden egyes mozgáslépésben precízen vezérelheti őket, ami nagymértékben programozható és szabályozható mozgássorozatokat eredményez.
Egyszerű meghajtás és vezérlés:A hibrid léptetőmotorok viszonylag egyszerű meghajtó- és vezérlőáramkörrel rendelkeznek más típusú motorokhoz képest. Nem igényelnek pozíció-visszacsatoló eszközök (pl. kódolók) használatát, és közvetlenül vezérelhetők megfelelő meghajtókkal és vezérlőkkel. Ez leegyszerűsíti a rendszer tervezését és telepítését, valamint csökkenti a költségeket.
Nagyfokú megbízhatóság és stabilitás:A hibrid léptetőmotorok egyszerű felépítésüknek, kis számú mozgó alkatrészüknek és kefe nélküli kialakításuknak köszönhetően nagy megbízhatóságot és stabilitást kínálnak. Nem igényelnek rendszeres karbantartást, hosszú élettartamúak, és megfelelő használat és üzemeltetés mellett stabil teljesítményt nyújtanak.
Energiatakarékos és alacsony zajszintű:A hibrid léptetőmotorok energiahatékonyak, viszonylag alacsony teljesítmény mellett nagy kimeneti nyomatékot biztosítanak. Ezenkívül jellemzően alacsonyabb zajszinttel működnek, ami előnyt jelent számukra a zajérzékeny alkalmazásokban.
Motorkiválasztási követelmények:
►Mozgási/szerelési irány
►Terhelési követelmények
►Löketkövetelmények
►Végmegmunkálási követelmények
►Pontossági követelmények
►Kódoló visszacsatolási követelmények
►Manuális beállítási követelmények
►Környezeti követelmények
Gyártóműhely



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)